Method
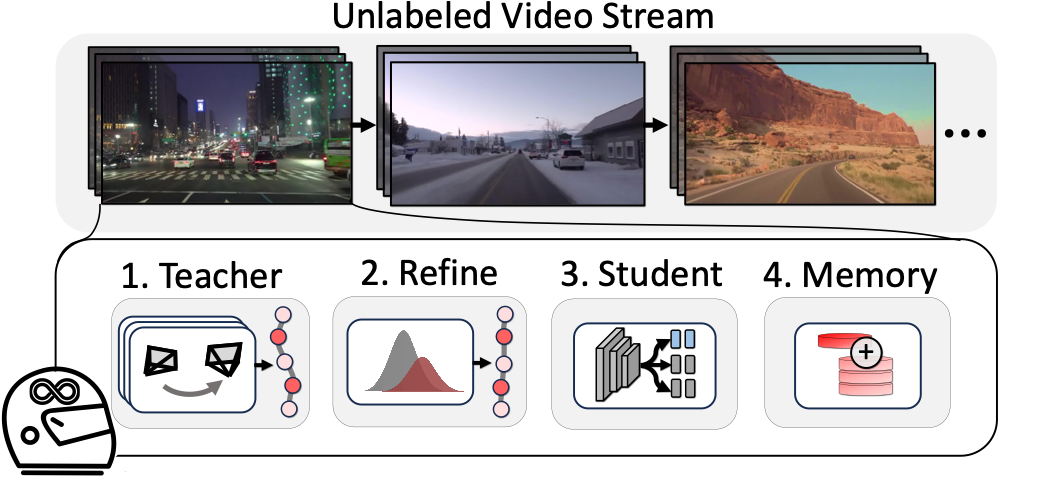
We present ∞-Driver, an agent that continually learns from unlabeled incoming video data. For each video in the video stream, the agent employs an ensemble of inverse dynamics models to infer waypoint pseudo-labels and their uncertainty (higher uncertainty is depicted in red). Noisy pseudo-labels are automatically refined through consistency-based re-labeling and confidence-based filtering. Next, a driving policy student model is trained over incoming and episodic memory replay data. The memory buffer is updated to incorporate high-uncertainty samples. This maintains a diverse set of samples to retain knowledge and prevent forgetting, despite only viewing a given image once. Towards learning a generalized driving policy, our efficient framework enables highly scalable training, i.e., over millions of video frames from the web.